
|
|||||||
|
|||||||
|
||||||
|
||||||
|
||||||||||||
|
||||||||||||
|
|||||||||
|
|||||||||
|
|||
|
|||
|
|||||||||||||
|
|||||||||||||
|
|||||||||
|
|||||||||
|
||
|
||
|
|||||
|
|||||
|
||
|
||
|
|||
|
|||
|
|||
|
|||

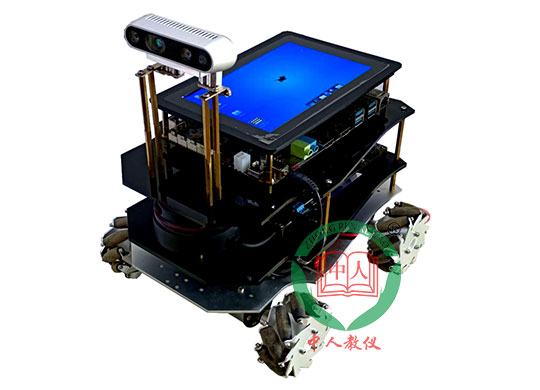
上海中人专业提供ZRRGZN-03人工智能多维运动控制平台,是专业的教学博鱼(中国)生产厂家,我们欢迎您来我们生产基地考察ZRRGZN-03人工智能多维运动控制平台,并为您提供专业的解决方案。教学博鱼(中国)可以解决教师教学缺少平台,学生缺少实操经验的难题。ZRRGZN-03人工智能多维运动控制平台,是中人公司的品质效益保障教学产品。 文章内容中的图片为参考图片,仅供参考,以实物为准.
本文关键词:ZRRGZN-03人工智能多维运动控制平台
智能网关:
l 处理器:64位四核CORTEX-A57,128核MAXWELL GPU;
l 内存:4GB LPDDR,板载存储:64GB;
l 接口:USB3.0×4,Micro USB×1, HDMI×1,RJ45×1,DC5.5×2.1电源接口;
l 集成Linux、Python等运行环境,支持数字图像处理、机器视觉、深度学习等算法、硬件、应用的开发和学习。
l 搭载 7 寸 LVDS 高清屏。
l AI 自动驾驶平台车体不小于 360mm*210mm*350mm,
l 采用高性能双路 ARM Cortex-M4 STM32G4 控制器单元,
l 提供电机驱动及传感驱动。
l 四驱独立悬挂轮式驾驶底盘,大功率减速电机。
激光雷达
相较于传统技术,利用红外激光博鱼(中国)可实现超大屏幕的多点触摸,其反应更快、精度更高、抗环境光能力更强。激光雷达作为核心传感器,可快速获得环境轮廓信息,配合SLAMWARE使用,可以帮助机器人实现自主构建地图、实时路径规划与自动避开障碍物。应用领域智能扫地机、家用机器人。
测量半径:12米,测量频率:8000次/秒,扫描频率:5.5HZ,360度扫描测距
机器视觉-双目深度体感摄像头
双目深度体感摄像头是VR/AR、机器人和无人驾驶最核心的技术支撑之一,而深度摄像头就是这类硬件的眼睛。只有机器对“看到的”东西,定位定姿精度更高时,才能更好地识别和做出判断,从而提升机器的可用性和产品化速度。利用双目立体视觉成像原理实现三维定位,即可进行手势、肢体动作的综
使用距离:0.8m至 3.5m之间,视野:58° H, 45 V, 70° D(水平,垂直,对角),传感器:深度,深度影像大小:VGA(640x480) : 30fps,QVGA (320x240): 60fps,接口:USB2.0
工程应用方向
机器导航应用
同时定位与地图构建(Simultaneous Localization And Mapping,简称 SLAM),通常 是指在机器人或者其他载体上,通过对各种传感器数据进行采集和计算,生成对其自身位置姿态的定位和场景地图信息的系统。SLAM 技术对于机器人或其他智能体的行动和交互能力至为关键,因为它代表了这种能力的基础:知道自己在哪里,知道周围环境如何,进而知道下一步该如何自主行动。 它在自动驾驶、服务型机器人、无人机、AR/VR 等领域有着广泛的应用,可以说凡是拥 有一定行动能力的智能体都拥有某种形式的 SLAM 系统。 一般来讲,SLAM 系统通常都包含多种传感器和多种功能模块。而按照核心的功能模 块来区分,目前常见的机器人 SLAM 系统一般具有三种形式:基于常规传感器的导航、 基于激光雷达的 SLAM(激光 SLAM)和基于视觉的 SLAM(Visual SLAM 或 VSLAM)。
视觉导航
AI 视觉/语言/控制多维平台通过多维景深摄像头立体视觉感知完成图像处理,支持 语音识别、背景移除、增加现实、3D 扫描、目标跟踪、面部处理等,实现基于 ROS 系统 的深度摄像 SLAM 导航和构图。
实验内容
移动机器人控制实验
l 相机标定
l 动态目标跟随
l 基础运动控制
l 机器人驱动系统
l 视觉巡线
l Gmapping建图
l 激光雷达建图与导航
l 交通灯识别
l 交通标志识别
l 车道识别实验
l 人脸追踪
机器人检测与感知实验
l 机器人视觉感知
l 移动机器人自主定位与姿态传感
l 移动机器人未知环境感知
l 移动机器人视觉测距
综合应用课程设计
l 基于SVM的交通标志识别系统设计
l 基于深度学习的车道线检测与自适应巡航设计
l 基于朴素贝叶斯的移动机器人自助避障系统设计
l 基于循环神经网络的车牌识别系统设计
l 基于CNN与SVM的交通标志的识别系统设计
l 基于HOG与SVM的交通标志识别系统设计
l 基于深度学习的车道线检测系统设计